robot end effector pdf
The task was to design an end effector. Designs for end effectors are as numerous as the applications employing robots.

Build Your Own Gif 638 1044 Electric Mandolin Plans Guitar Building Mandolin Banjo Ukulele
Other aPplications in which tools are used as end effectors include dc welding.

. End effector on a robot manipulator platform UR5. Summary This chapter contains sections titled. Other possible end effectors are machine tools like a drill or milling cutters.
One of applications of industrial robots is spot welding in which Odes constitute the end effector of the robot. Aside from the robot itself the most critical device in a robotic automation system is the end effector. The novelty of the proposed methodology is that it integrates the end-effectors a b Fig.
The end-effector for the robot has been actively controlled by two electric motors using mechanical impedance. Section 5-4 discusses the various end effectors was mentioned above that grippers are sometimes 1. By definition an end effector is the device at the end of a robotic arm that allows it to interact with its environment.
Skip to Article Information. An end effector is a kind of tool holder which is placed at the end of a robot. Robot Hands and EndEffectors.
Experiment shows that this end effector can perform the task of cutting and smashing branches within 1 cm. End-effectors design and the manipulation planning in multi-robot material handling systems to exploit the syn-ergies to improve the productivity. End effectors may consist of a gripper or a tool.
The object is suck by the suction. Basic grasping end effector forms are referred to as grippers. End effectors are found at the end of the robots arm.
Have students think of a job that an end effector could do and design an end effector for the job. The end effector in this case should hold a drill as well as a sensor. This activity demonstates how an end effector is constructed to resemble a human hand.
However a robot arm alone can hardly accomplish any job. 2 Retracting end-effector after loading late into press a large end-effector b small end-effector. The same kind of tendons are used to transfer the force from the active joints to the passive ones.
The design parameters are as follows. Sometimes they are referred to as end-of-arm tooling or manipulator. Up to 10 cash back The force-controlled end-effectors for industrial robots usually face the problems of low output force poor control accuracy or slow dynamic response.
The end effector on the space shuttles. The end effector is like a mechanical hand with a cylinder 332 centimeters 1307 in in diameter by 258 centimeters 1016 in deep. Mechanical Engineering Laboratory.
Transformation matrix from base to end-effector is. Keywords - pruning robot end effector robot I. Human-Robot Interface for end effectors 161 4.
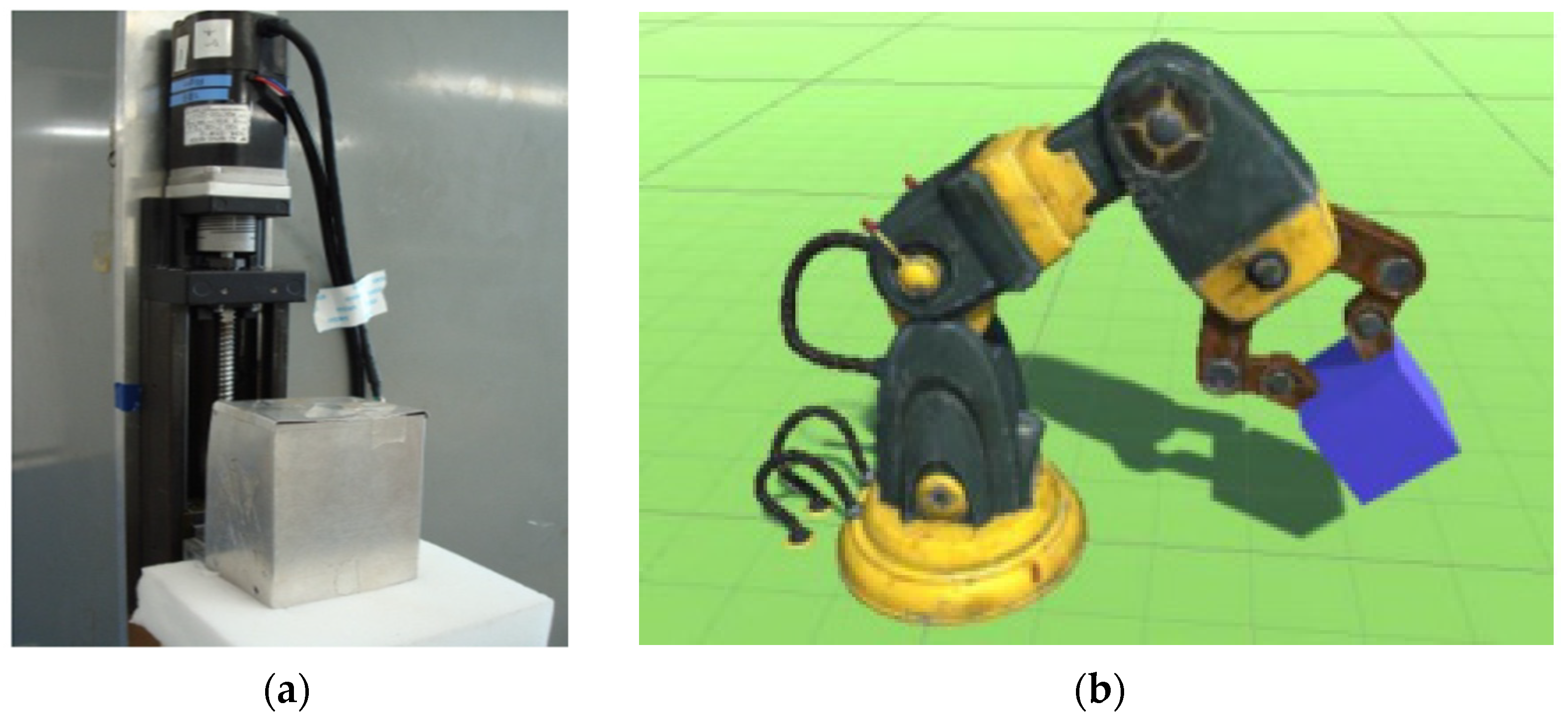
End effectors are the piece of the robot that interacts with the parts or components in the environment. A surgica robots end effector could be a scalpel or others tools used in surgery. This paper presents a pneumoelectric force-controlled end-effector PFE for industrial robots to perform continuous contact operations.
The end-effector may be holding a tool or the end-effector itself may be a tool. A short summary of this paper. The robot uses the end-effector to accomplish a task.
Their undoubted advantage is a low friction coefficient and high tensile strength that is the ratio. 37 Full PDFs related to this paper. 97 44 Design and Implementation of Continuum Soft Robot End Effector.
In this eBook you will find information on the different end effectors available on the market. Using April Tag to lacate the object and grasp or suck it. Tools Grippers are end effectors used to.
The end-effector possesses the advantages of both. Powered by four low-power motors to cut with its blade saw. 10252018 10 Robot Manipulator Classifications Servo robots-A point-to-point robot can be taught a discrete set of points but there is no control on the path of the end- effector in between taught points.
System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire. Some examples of end. Full PDF Package Download Full PDF Package.
While for passive force control 16 17 a passively compliant end-effector is used to adjust the robots trajectory based. 112 46 Control and Performance Evaluation of. This does not refer to the wheels of a mobile robot nor the feet of a humanoid robot which are not end-effectors because they are part of the robots mobility.
The measurement of the robotic manipulator end-effector interaction forces can in certain cases be challenging especially when using robots that have a. In a wider sense an end effector is the part of a robot that interacts with the work environment. A straight -line path over the range of gripper motion.
The end effector could wrok well on the robot manipulator shown in Figure 7. End effector system working with robot manipulator in two mode. The part of the robotic arm that grabs objects is called an end effector This wire-snare device is designed to fit over special grapple fixtures knobbed pins on the Shuttle ISS and ISS modules.
End effectors can be part of the robots integral design or added-on to the base robot. Introduction Classification of EndEffectors Actuator System for EndEffectors Mechanical Hands Special Tools Universal Hands Practical Implementation. 100 45 The Finger Kinematics in the Continuum Soft Robot End Effector.
When referring to robotic end. INTRODUCTION Pruning is a cultivation technology that has great influence on the size flowering and production of fruit trees 1-3. Skip to Article Content.
There are many types of end-effectors for different types of applications. 43 Continuum Soft Robot End Effectors Basic Prototypes. The center point of end -effector should remain as close as possible to the same location ie.
This is why each manufacturing robot needs an end effector. The object is grasp by finger gripper. The drill that would be used in this project was a Desoutter CFD 1155398 which is a manual drill meant to be held by hand and not by a robot.
This paper describes a capstone design project in developing an end -effector for robotic arm that is capable of grasping objects of varying sizes.

Next Proyect Scara Robot Diseno Industrial Disenos De Unas Industrial
Robotworx Grippers For Robots

Riceaid Rice Transplanter Georgia Tech Me Senior Design Youtube Simple Machines Rice Plant 3d Printer Projects

A Wheeled Vinerobot To Monitor Grape Growth Mobile Robot 3d Printer Parts Robot

Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy Robot Gripper Robot Arm Robot Design

Abb S Frida Offers Glimpse Of Future Factory Robots Ieee Spectrum
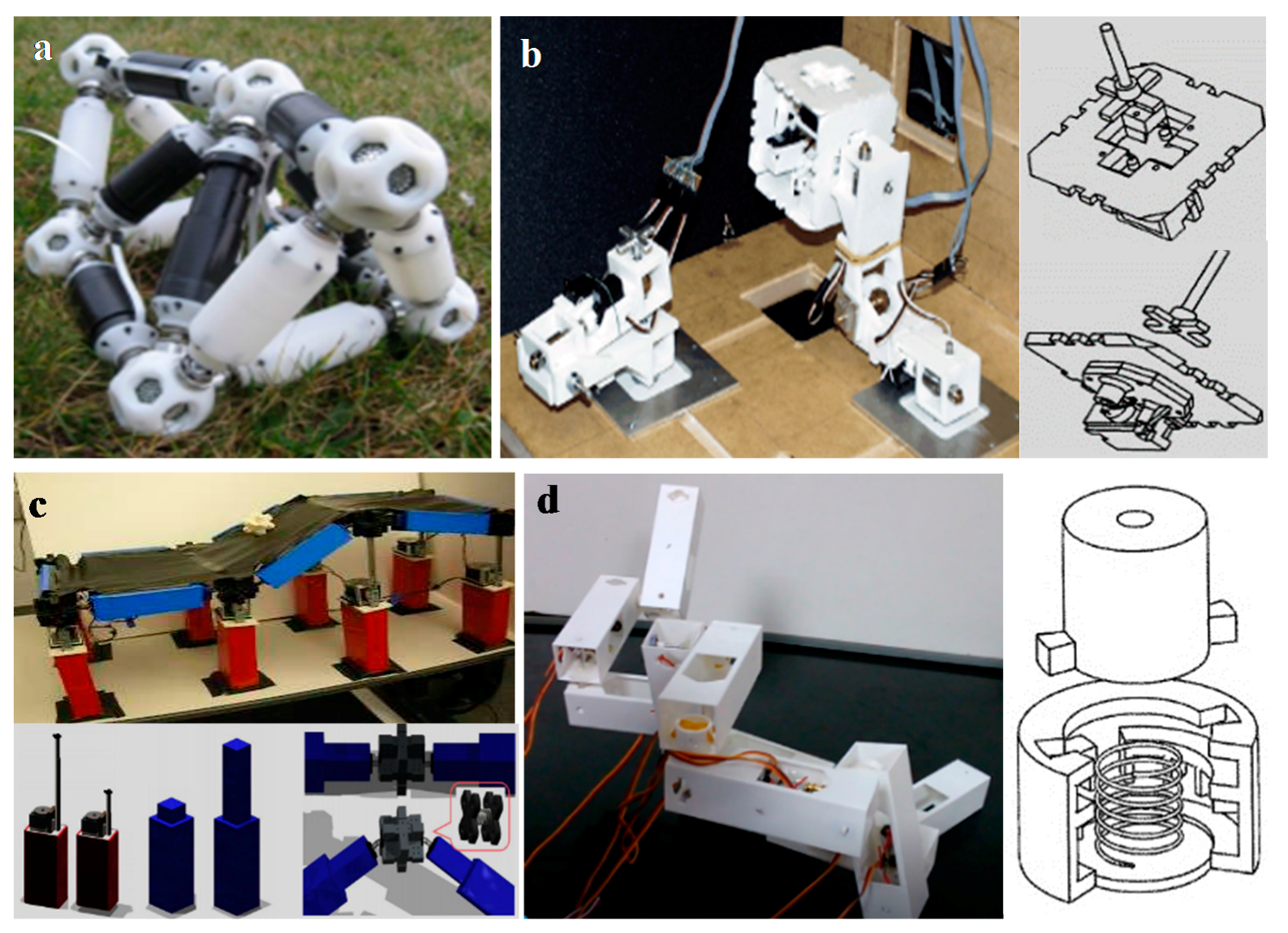
Robotics Free Full Text Resilient Robots Concept Review And Future Directions Html
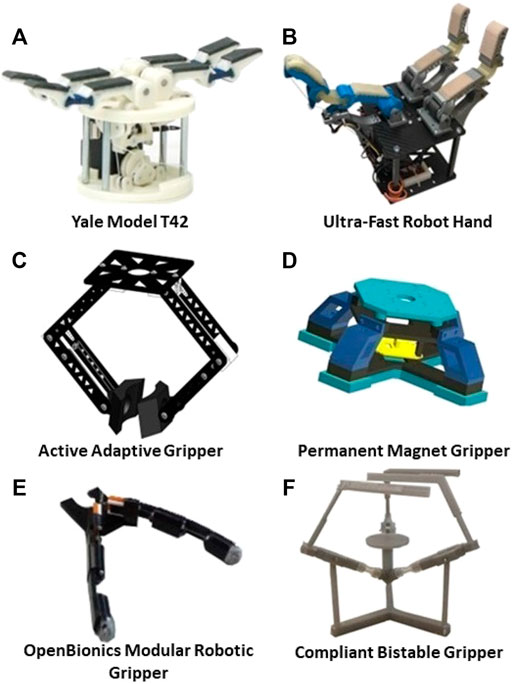
Frontiers On Aerial Robots With Grasping And Perching Capabilities A Comprehensive Review Robotics And Ai

Robot End Effector Definition And Examples
Machines Free Full Text A Review Of End Effector Research Based On Compliance Control Html

Pdf Applications Of Collaborative Industrial Robots In Building Construction Semantic Scholar

Practical Use Of End Effectors Onrobot

Pdf Applications Of Collaborative Industrial Robots In Building Construction Semantic Scholar

Robot End Effector Market Type Robot Type Application 2021 2030
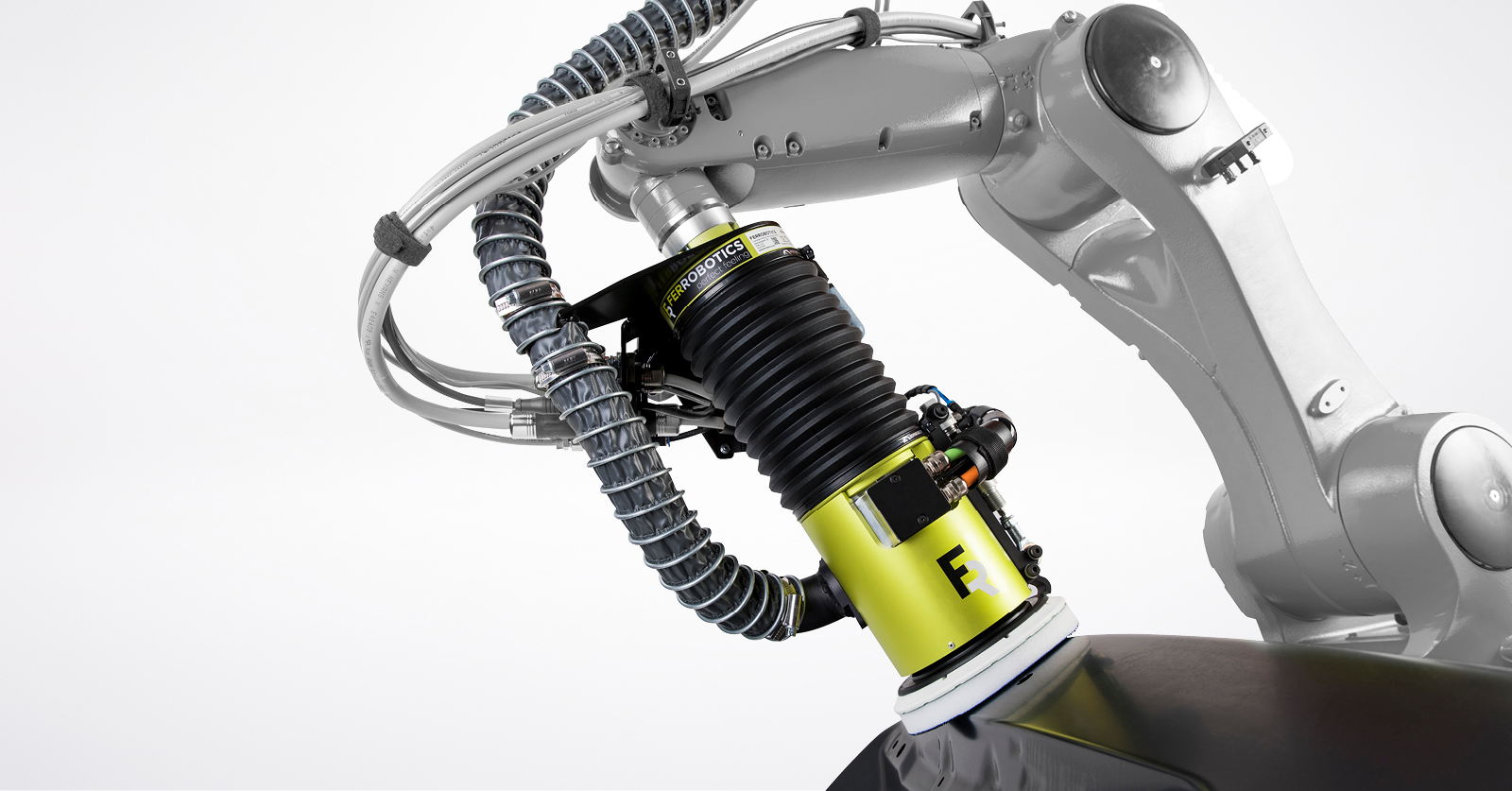
What Is An End Effector And Or End Of Arm Tool Eoat Ferrobotics

Okq5q61xctbesm

Robot End Effector Definition And Examples

Hydraulic Robotic Arm Robot Arm Dremel Tool Projects Robot

Pdf Robotics 1 Lecture 7 End Effectors